研究分野
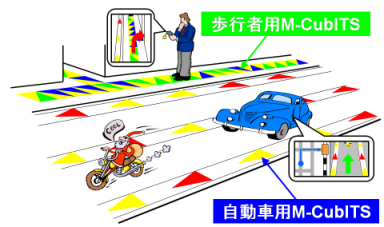
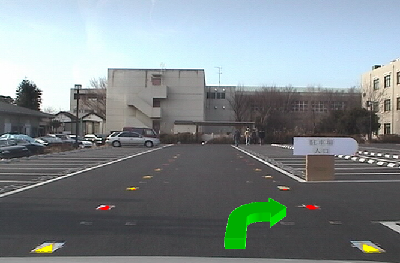
- 移動体の安全運転支援およびナビゲーションに関する研究
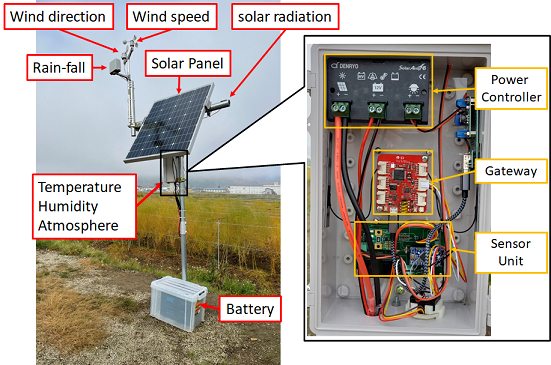
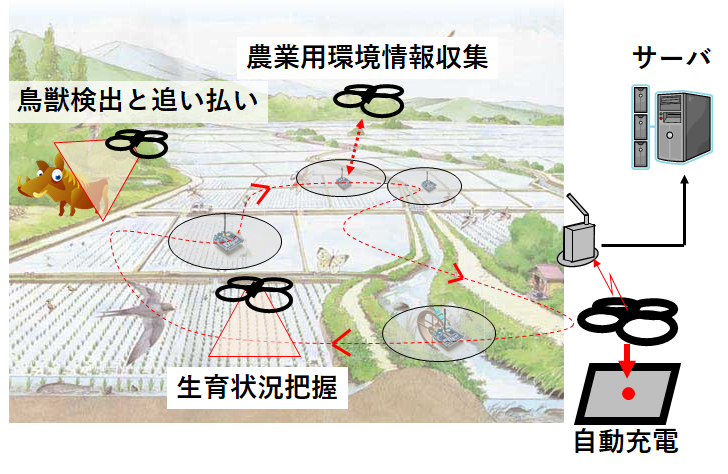
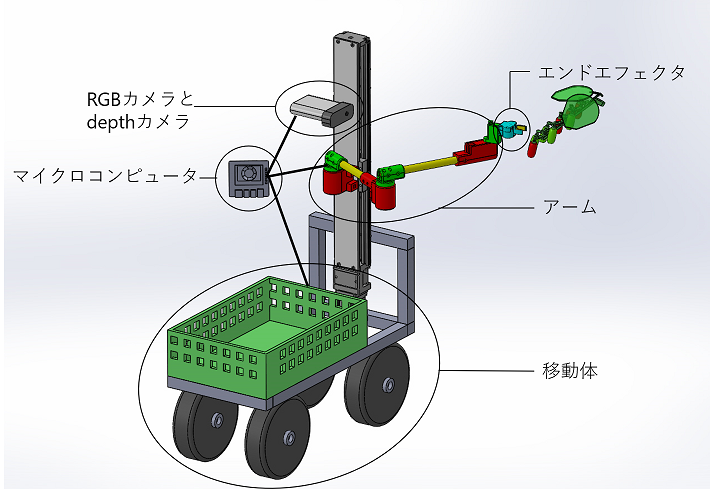
- 農業分野における環境情報モニタリングに関する研究
- 地方における地域活性化に関する研究
技術要素
- 位置特定
- HMI(Human Machine Interface)
- センシング
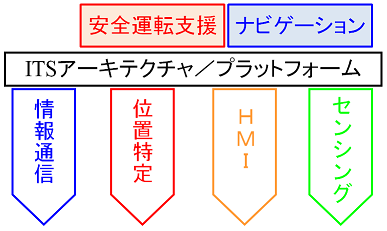
プラットフォーム指向に基づいて研究を遂行している[1]。本プラットフォームはアプリケーションと要素技術は独立であり、独立に進化する。アプリケーションでは移動体の安全運転支援とナビゲーションに関する研究を行っている。要素技術では情報通信、位置特定、HMI、センシング、データベースなどに関する研究を行っている。